Heterogenous Mobile Manipulator Collaborating for On-Demand Sensing
January 2022 - December 2022
- Implemented the code to collect dataset for different orientations of the KUKA iiwa7 manipulator with Blender.
- Built an auto-encoder network to process the KUKA dataset and produce 7 belief maps, one each for every joint (key points).
- Combined the resultant 2D belief maps with the known camera intrinsics of the Toyota HSR robot and forward kinematics of KUKA using OpenCV PnP to get the relative pose of the base of KUKA w.r.t HSR frame.
Process Followed
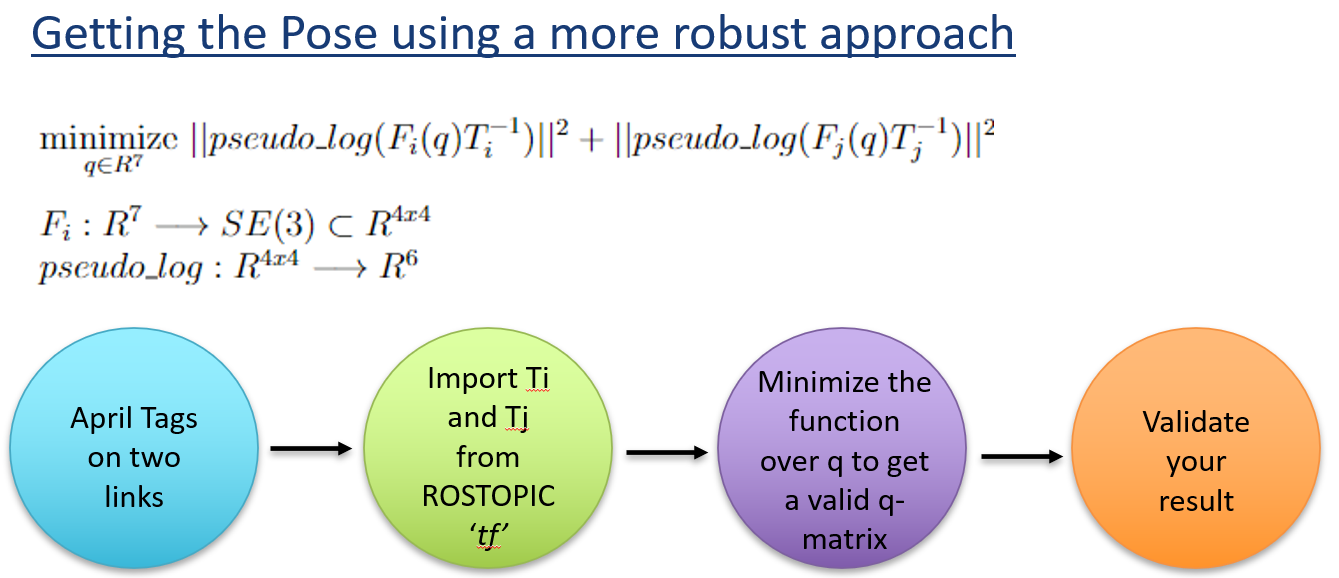
Math for performing inverse kinematics on 7 DOF robot
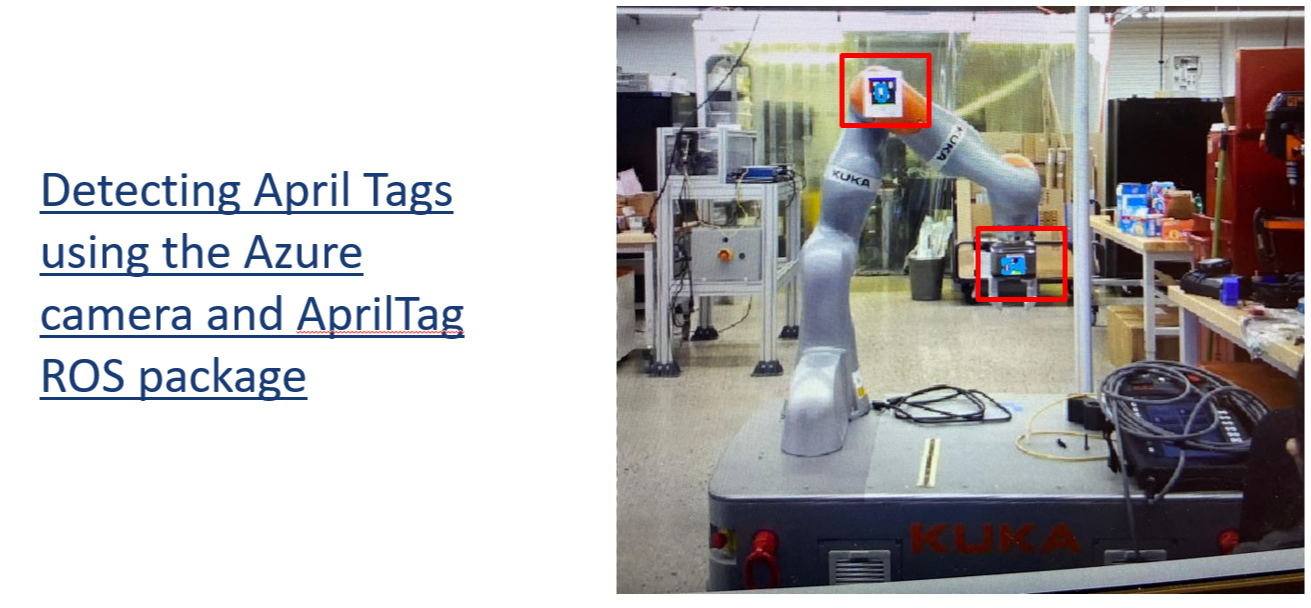
April Tag detection via ROS
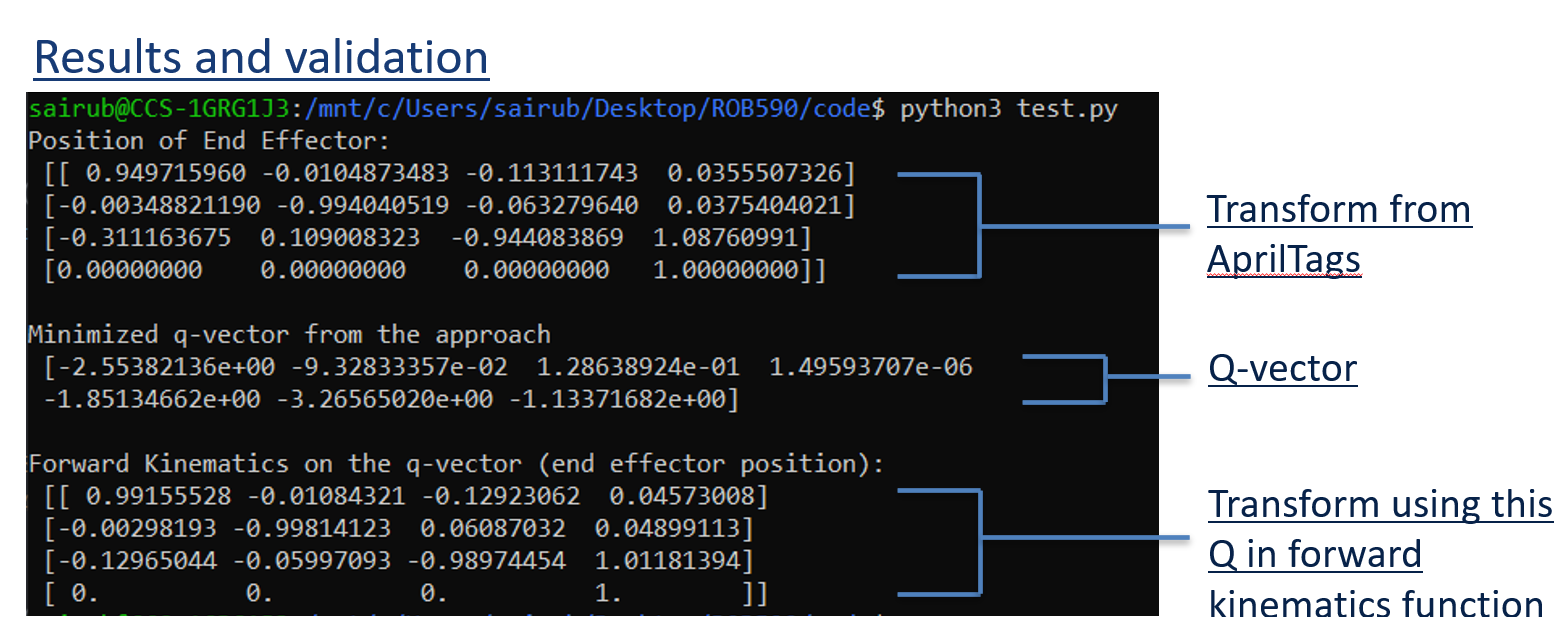
T matrices comparison from ROS + kinematics and network output
real data results
real data results